
Former President of Intel China Research Institute and CEO of Uzentech Wu Gansha gave a speech at Nvidia GTC Conference
When Wu Gansha’s status became the CEO of Tide Science and Technology, he also became a regular guest of various autopilot forums. At this time, Nvidia’s GPU technology conference held in Beijing had his keynote speech. Judging from the live slides, the general content has not changed much compared with the past. There are some minor updates. Let's review.
Consistent with the opinions of most people in the industry, Wu Gansha believes that artificial intelligence is the future trend. Artificial intelligence in 2016 is equivalent to the Internet in 1996 and the PC in 1976. The latter two have led the digitization and networking of 20 years respectively. The next 20 years will be an astounding 20 years of artificial intelligence.

Determine the future of smart driving
Smart driving developmentAccording to Wu Gansha, in the next 5 to 10 years, the market size of smart driving will be the largest and the social effect will be the most outstanding. Because at this important time point in 2020, most car manufacturers will launch new models to drive orders for laser radars, which will reduce the unit price from US$75,000 to US$500, and promote the mass production of self-driving cars.
In many previous speeches, Wu Gansha has already defined his definition of the stage of smart driving:
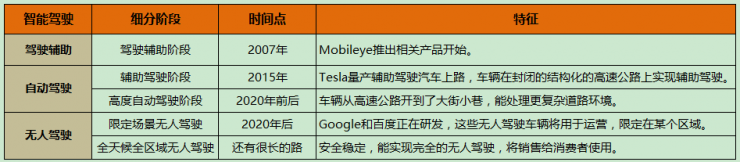
In the development phase of smart driving in the eyes of Wu Gansha, he did not mention 203X this time (watchmaking: Lei Fengnet (search for "Lei Feng Net" public number attention) )
At present we have only experienced the first two stages: from driving assistance to assist driving. The technical requirements of the two are also very different.
1. Driver assistance is important because the false alarm rate is low, and the false negative rate is not so important.
2. The missed report rate for assisted driving must be 0, and the false alarm rate must also be very low.
Because a missed report may result in a car crash, the inexplicable emergency brakes are very influential and dangerous.
1. Driving assistance requires only a visual sensor for perception.
2. Assisted driving requires vision, millimeter-wave/ultrasonic radar and other multi-sensor fusions to perform a series of actions such as perception, planning, decision-making and control.
Better identification schemeToday, most manufacturers want to do better in assisted driving.
Wu Gansha used the example of Tesla's first automatic collision crash in May as an example to illustrate some of the drawbacks of the current solution: Because of the inevitable flaws in the camera and laser radar (eg, it is impossible to clearly identify whether the front is the body or the bridge ) It causes a tragedy. Tesla is also currently upgrading its assisted driving system.
In response to this, Wu Gansha's proposal is:
1. Through the deep learning algorithm, vehicle identification, pedestrian identification, identification plate identification, and lane line recognition can be identified regardless of distance, type, angle, or presence or absence of occlusion, and the perceived environmental ability is stronger. However, when other vehicles appear from the side of the vehicle, it is difficult to recognize them. At this time, the deep learning algorithm is also flawed.
2. Based on the stereo vision algorithm, the vehicle is captured and recognized by the stereo camera, and the defects of the deep learning algorithm are compensated. And can also identify uneven road surfaces.
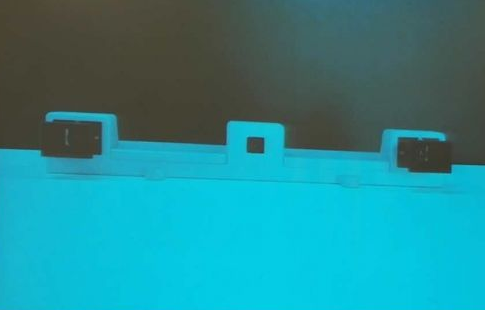
Three-dimensional stereo camera (left, right, middle and three cameras)
3. Establish a multi-task recognition network that combines deep learning algorithms with stereo vision algorithms to systematically identify pedestrians, vehicles, signs, lane lines, etc.
Moreover, he is building a comprehensive world model that can identify emergencies on roads in different countries and regions (such as Australian kangaroos jumping on the road, camels entering the road in the Middle East, etc.), and integrating deep learning algorithms. Assisted driving performed better.

Comprehensive world model
In addition to the above road surface detection section, there are detections of a drivable area (a road's drivable range) and an unstructured road (a snowy sky's road boundary is buried). In this case, a deep learning algorithm is also required to make detection more accurate.
Targeting and mappingAfter the identification and detection scheme is given, the following problem should be solved: the accuracy of the decimeter or centimeter is solved.
Positioning plan
At present, many manufacturers use inertial navigation systems and GPS RTK (high-precision GPS) as solutions to provide accurate location information. However, current inertial navigation systems are basically very expensive and are not optimal solutions.
Wu Gansha believes that the use of a visual odometer instead of an inertial navigation system can also achieve good results with high accuracy. His team is currently doing this.
Map scheme
Different from the high-precision maps of Google and other map makers, Wu Gansha's current map scheme is:
1, based on Landmark (ie road marking: signs on both sides of the road);
2, based on Lanemark (God's perspective bird view "Bird View" road surface markings), the accuracy of 10cm level.
The map acquisition equipment of this scheme has a low price, a low positioning equipment price and real-time updating, and is a map specially made for automatic driving.
Innovative cameraWu Gansha also mentioned that there are many innovative opportunities for the camera at the moment. They can draw on the creation of some of the most intriguing nature in the world: flies' ventral eyes, hawk's super-distant eyes, chameleon's 360-degree look around, and Husky's night vision.
In the future, there will be 6-8 high-precision cameras on a car body, with a resolution of more than 7.5 million pixels, better integration with millimeter-wave/lidar, and better performance in heterogeneous visual fusion, serving autonomous driving. Even unmanned.
In the end, he believes that not the best deep learning algorithm is the one that is most suitable for solving the problem. The software and hardware must adapt to the problem.
4L Deep Fryer,Household Electric Deep Fryer,Extra Filter 4.5L Electric Deep Fryer,Timer Control Electric Deep Fryer
Shaoxing Haoda Electrical Appliance Co.,Ltd , https://www.hotplates.nl