With the rapid development of science and technology, opto-mechatronics technology came into being. Opto-mechatronics technology is a comprehensive application of group technology such as mechanical technology, optoelectronic technology, electronic technology and computer technology. Opto-mechatronics technology involves machinery manufacturing, transportation, home appliances, instrumentation, medical , toy entertainment and many other industries, and has an important position in industrial and economic development. Information, biology, space, oceans, new materials, new energy and other high-tech fields, the informatization, modernization of national defense equipment and the transformation of traditional industries are inseparable from the development of opto-mechatronics technology.
The optical and mechatronics technology has developed rapidly, and various technologies are being separated from the original technical system, with strong system characteristics and relatively independent research and application fields. With the development of microelectronics technology and microsystem technology, the application and development of opto-mechatronics technology has entered a new stage. Electromechanical products and opto-mechanical products have become the main products of home appliances, medical equipment, toys and other industries; opto-mechatronics technology plays an important role in industrial equipment transformation and improvement of manufacturing equipment precision and efficiency; opto-mechatronics technology in aerospace, defense The development of intelligent robots and other scientific research fields that highlight the country's comprehensive strength is even more prominent.
The book "Common Organizations of Opto-mechatronics System" includes the design theory, basic structure, mechanism characteristics, key technologies, typical cases and application characteristics of the common institutions of opto-mechatronics systems. Among them, CNC machine tools, machining centers, and three For example, the common mechanisms of classical opto-mechatronics products such as coordinate measuring instruments, tool microscopes, industrial robots , laser printers, etc., systematically introduce the composition characteristics and application characteristics of the mechanisms contained in these products, and also use laser cutting machines, photoelectric theodolites, and wheels. For example, the practical mechanism of the emerging opto-mechatronics devices such as crawler robots , bionic robots , CT scanners, and optical disc drives is analyzed in detail. The composition characteristics and application characteristics of the devices contained in these devices are analyzed in detail, and the opto-mechatronics system is demonstrated. New technologies and new achievements of commonly used institutions.
Variable shape crawler robot
The shape variable crawler robot means that the configuration of the crawler belt used by the robot can be appropriately changed according to the terrain conditions and the work requirements. Figure 8-44 shows a schematic view of the shape of a variable-track crawler robot. The main body of the robot is two variable-shaped crawlers that are driven by two main motors. When the speeds of the two tracks are the same, the robot realizes the forward or backward movement; when the speeds of the two tracks are different, the robot realizes the steering motion. When the main boom rotates around the shaft on the track frame, the planetary gears are rotated to achieve different configurations of the track to adapt to different movements and working environments (see Figure 8-45).
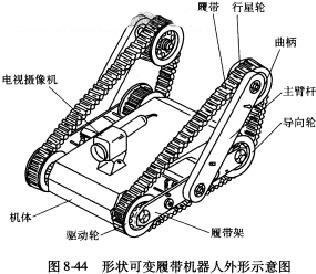
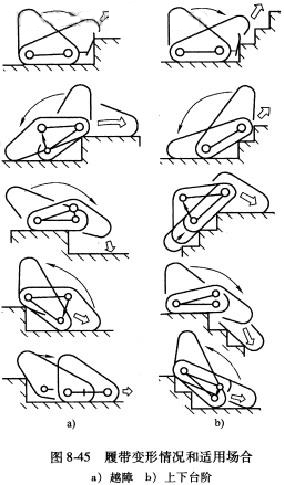
Figure 8-46 shows a schematic view of the deformed track drive mechanism. The main motor drives the drive wheel to move, causing the track to rotate. The main arm motor meshes with the gear 1 through a pinion gear coaxial with the motor, and drives the main arm to rotate on the one hand; on the other hand, the sprocket rotates by the meshing of the gear 2, the gear 3 and the gear 4; the sprocket further makes the chain pass through the chain Install the crank of the planet wheel. Since the gears 1 and 4, the gears 2 and 3 have the same number of teeth, respectively, the gear 1 and the gear 4 have the same rotational speed and the opposite direction. The number of sprocket teeth at both ends of the chain is equal, so that when the main arm motor is working, the angle at which the main boom rotates is equal to the absolute angle of the crank and the direction is opposite.
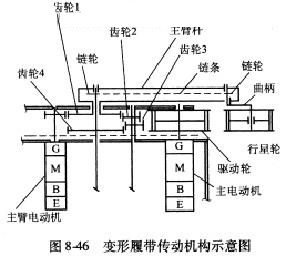
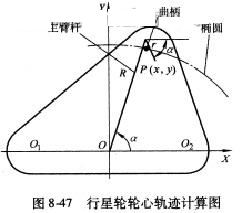
Figure 8-47 shows the calculation of the trajectory of the wheel center of the planetary wheel. The trajectory of the P point of the wheel center of the planetary wheel can be derived from the following formula:

(84)
Obviously, Equation (8-4) is a standard elliptic equation, which means that the robot's track can remain elastic without any change in any shape.
New Wireless Electric Mop Clean Machine
2018 New Mop Floor Clean Machine, Clean efficiency 97% and Easy to assembly this floor clean machine .double clean cloth clean floor and Easy to change battery.
Best wireless floor clean machine, best technology with best clean robot .welcome to place order from our company.
Electric Floor Mop cheap price ,high quality and sale very large .
New Wireless Electric Mop Clean Machine
New Wireless Mop Clean Machine,Fashion Floor Clean Machine,Wireless Clean Machine,Mop Clean Tool,Electric Floor Mop,Electric Mop
Zhengzhou Bangmi Smart Technology Co., Ltd. , https://www.cleanwindow-robot.com