The rotor, like the wheel, is a magical invention.
The four-rotor drone has been turned into an aerial camera, which satisfies many ordinary people's imagination about the sky.
The reason why the rotor can fly, friends who have played bamboo poles should know: When the movement of the hand gives the bamboo pole a rotation speed, it will produce lift, let the bamboo pole take off.

In the same way, the multi-rotor drone is also rotated by the motor to cause the propeller to generate lift and fly. For example, a quadrotor drone, when the sum of the lifts of the four propellers of the aircraft is equal to the total weight of the aircraft, the lift of the aircraft is balanced with gravity, and the aircraft can hover in the air.
When I was a child, I watched the comics. I saw the Doraemon and Daxiong’s bamboo poles flying freely in the air. I wanted to fly in the air and overlook the earth.
But if someone really invents the same bamboo pole now, I definitely don't want to wear it. Because the effect of flying is like this:

The propeller is spinning wildly, and the man is also spinning in the opposite direction. .. ..
Daxiong's whole people have been forced to change, how can they see the scenery together with Shizuka?
According to Newton's third law, while the rotor is rotating, it also applies a reaction force (anti-torque) to the motor, causing the motor to rotate in the opposite direction. This is also why today's helicopters carry a "small tail" that exerts a force in the horizontal direction to counteract this reaction and keep the helicopter body stable.
Back to the four-rotor aircraft, its propellers also generate such forces, so in order to avoid the crazy spin of the aircraft, the four propellers of the quadrotor rotate in opposite directions.
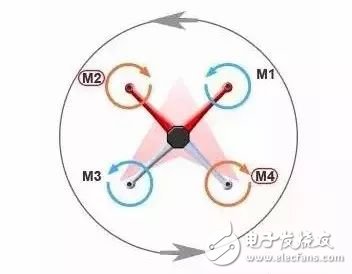
As shown in the figure below, the red arrow of the triangle indicates the orientation of the nose of the aircraft, the direction of rotation of the propellers M1 and M3 is counterclockwise, and the direction of rotation of the propellers M2 and M4 is clockwise.
When flying, the counterclockwise reaction force (anti-torque) generated by M2 and M4 cancels the clockwise reaction force (reverse torque) generated by M1 and M3, and the aircraft fuselage can remain stable. It will not be as crazy as Daxiong. "Rotate."

Only in this way, the front, rear, left and right or rotary flight of a multi-axis aircraft is also achieved by the speed control of multiple propellers:
Vertical lift
This is well understood. When the airplane needs to raise the altitude, the four propellers accelerate at the same time, the lift increases, and the airplane rises. When the aircraft needs to reduce the height, the four propellers will reduce the speed at the same time, and the aircraft will drop.
The reason why it is emphasized at the same time is that it is very important to maintain the attitude of the aircraft body when maintaining the relative stability of the rotor speed. After reading it, you will understand it~
In situ rotation
As already mentioned above, when the speed of each motor of the drone is the same, the counter torque of the aircraft is cancelled and no rotation occurs.
However, when the aircraft is to be rotated in situ, we can use this counter torque. The motor speeds of two clockwise rotations of M2 and M4 increase, and the speeds of two counterclockwise rotations of M1 and M3 decrease, due to the anti-torque effect. The airplane will rotate counterclockwise.
Horizontal movement
Unlike a passenger aircraft that we usually ride, a multi-axle aircraft does not have a propeller that is perpendicular to the ground like a passenger plane, so it cannot directly generate horizontal forces to move horizontally.
Of course, this is hard to beat us. For the four-rotor of the figure, when it is necessary to follow the direction of the triangular arrow, the M3 and M4 motor propellers will increase the speed, while the M1 and M2 motor propellers will reduce the speed, due to the lift at the rear of the aircraft. Above the front of the aircraft, the attitude of the aircraft will tilt forward.
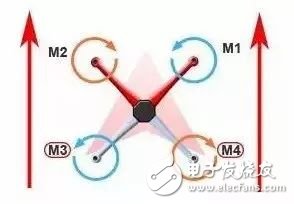
The side view when tilting is as shown in the following figure. At this time, the lift generated by the propeller has a component in the horizontal direction in addition to offsetting the gravity of the aircraft in the vertical direction. This component gives the aircraft a horizontal acceleration. It is therefore possible to fly forward.

Conversely: When the M1 and M2 motors accelerate and the M3 and M4 motors decelerate, the airplane will tilt backwards and fly backwards.
Similarly, when the M1 and M4 motors accelerate and the M2 and M3 motors decelerate, the airplane tilts to the left and flies to the left;
When the M2 and M3 motors accelerate and the M1 and M4 motors decelerate, the airplane tilts to the right and flies to the right.
Such an explanation, does it feel that the flight principle of the multi-rotor is very simple? ~
In fact, before the multi-rotor, people used more complex fixed-wing aircraft and helicopters for aerial photography.
However, the take-off and landing of fixed-wing aircraft is very demanding on the site, and it cannot be hovered. It cannot rise vertically and fall, and the limitation is too great.

Although the helicopter is heavy and fast, its structure is very complicated and precise. Thousands of parts are very troublesome in terms of debugging and maintenance.

In contrast, the multi-rotor flight principle is simple, the fuselage structure is simpler and more reliable, and consumers can quickly get started without excessive debugging and maintenance, so the multi-rotor quickly occupied the aerial photography market.
A siren is a loud noise-making device. Civil defense sirens are mounted in fixed locations and used to warn of natural disasters or attacks. Sirens are used on emergency service vehicles such as ambulances, police cars, and fire trucks. There are two general types: pneumatic and electronic.
Many fire sirens (used for calling the volunteer fire fighters) serve double duty as tornado or civil defense sirens, alerting an entire community of impending danger. Most fire
sirens are either mounted on the roof of a fire station or on a pole
next to the fire station. Fire sirens can also be mounted on or near
government buildings, on tall structures such as water towers,
as well as in systems where several sirens are distributed around a
town for better sound coverage. Most fire sirens are single tone and
mechanically driven by electric motors with a rotor attached to the
shaft. Some newer sirens are electronically driven speakers.
Fire sirens are often called "fire whistles", "fire alarms", or
"fire horns". Although there is no standard signaling of fire sirens,
some utilize codes to inform firefighters of the location of the fire.
Civil defense sirens also used as fire sirens often can produce an
alternating "hi-lo" signal (similar to emergency vehicles in many
European countries) as the fire signal, or a slow wail (typically 3x) as
to not confuse the public with the standard civil defense signals of
alert (steady tone) and attack (fast wavering tone). Fire sirens are
often tested once a day at noon and are also called "noon sirens" or
"noon whistles".
The first emergency vehicles relied on a bell. Then in the 70s,
they switched to a duotone airhorn. Then in the 80s, that was overtaken
by an electronic wail.
Piezo Alarm,Siren And Alarm,Piezo Buzzer Siren,Piezo Buzzer Alarm Siren
Jiangsu Huawha Electronices Co.,Ltd , https://www.hnbuzzer.com