According to Memes Consulting, the competition between Lidar and other sensor technologies (camera, radar and ultrasound) increases the need for sensor fusion, while also requiring careful selection of photodetectors, light sources and MEMS micromirrors. .
With advances in sensor technology, imaging technology, radar, LiDAR, electronics and artificial intelligence, dozens of advanced driver assistance system (ADAS) functions have been implemented, including collision avoidance, blind spot monitoring, lane departure warning and parking assistance. The operation of such systems is synchronized by sensor fusion to allow fully automated vehicles or unmanned vehicles to detect the surrounding environment and warn the driver of potential road hazards, even taking evasive actions independent of the driver to avoid collisions.
Self-driving cars must also be able to distinguish and identify objects in front at high speeds. Using distance determination techniques, these self-driving cars must quickly build 3D maps of roads about 100 meters away and create high-angle resolution images at distances of up to 250 meters. If the driver is not present, the car's artificial intelligence must make the optimal decision.
One of the basic methods of this task is to measure the round-trip time (ToF) of the energy pulse from the self-driving car to the target and back to the vehicle. When the speed of the pulse through the air is known, the distance of the reflection point can be calculated. This pulse can be ultrasonic (sonar) or radio (radar) or light (LiDAR).
These three ToF technologies, with a higher angular resolution image, LiDAR is the best choice because LiDAR images have smaller diffraction (beam divergence) and better recognition of adjacent objects than radar (see figure 1). Higher angular resolution is especially important for high speed situations that require sufficient time to deal with potential hazards such as head-on collisions.
Laser source selectionIn ToF LiDAR, the laser emits a light pulse of duration τ, which activates the internal clock of the timing circuit at the instant of transmission (see Figure 2). When a light pulse reflected from the target reaches the photodetector, an output electrical signal that disables the clock is generated. This electronic measurement round-trip ToF Δt calculates the distance R from the target to the reflection point.
If the laser and photodetector are in the same position in reality, the distance R is affected by two factors:
c is the velocity of light in a vacuum, and n is the refractive index of the propagation medium (the refractive index in air is close to 1). These two factors affect the distance resolution ΔR: if the diameter of the laser spot is larger than the target size to be resolved, the uncertainty of measuring the spatial width w (w = cτ) of Δt and the pulse is δΔt.
The first factor is expressed as ΔR = ? cδΔt, and the second factor is expressed as ΔR = ? w = ? Cτ. If the resolution of the distance measurement is 5 cm, the above relationship indicates that δΔt is about 300 ps and τ is about 300 ps. ToF LiDAR requires photodetectors and electron detectors that utilize small time jitter (mainly contributing to δΔt) and lasers that emit short-term pulses (such as relatively expensive picosecond lasers). In a typical automotive LiDAR system, the laser produces a pulse duration of approximately 4 ns, so a minimum beam divergence angle is required.
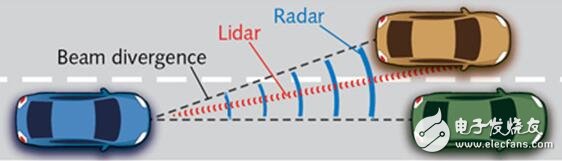
Figure 1 The beam divergence angle depends on the ratio of the aperture and wavelength of the transmitting antenna (radar) or lens (LiDAR). This ratio is too large for the larger beam divergence angle and smaller angular resolution produced by the radar. As shown, the radar (black) cannot distinguish between the two cars, while the LiDAR (red) can
For automotive LiDAR system designers, the most critical thing is to choose the wavelength of the light. However, there are several factors that limit this choice: human eye safety, interaction with the atmosphere, optional lasers, and optional photodetectors.
The two most popular wavelengths are 905 nm and 1550 nm. The main advantage of 905 nm light waves is that silicon can absorb photons at this wavelength, while silicon-based photodetectors are typically infrared indium arsenide (InGaAs) that detects 1550 nm light waves. (IR) Photodetectors are cheap. However, 1550 nm is safer for the human eye, allowing the laser to use more energy per pulse – an important factor in the photon budget.
Atmospheric attenuation (under all weather conditions), scattering from particles in the air, and reflections from the physical surface of the target are wavelength dependent. But for automotive LiDAR, this is a complex problem due to the many possibilities of weather conditions and reflective surface types. In a realistic environment, since the water absorption at 1550 nm is stronger than that at 905 nm, the light loss at 905 nm is less.
High Current Terminal Blocks,Panel Terminal Block,Feed Through Terminal Block,Heavy Power Terminal Block
Sichuan Xinlian electronic science and technology Company , https://www.sztmlchs.com